skid steer robotics Abstract. Recently autonomous ground vehicles have been extensively used due . Here's a short video showing how to adjust track tension and how to remove a rubber track on a Groundhog KH14G Mini Excavator.Have you got a Mini Digger / Excavator on hire but don't know how to operate one? This video is for you! Lewis goes over the basics of how to control the gea.
0 · slope based robot path tracking
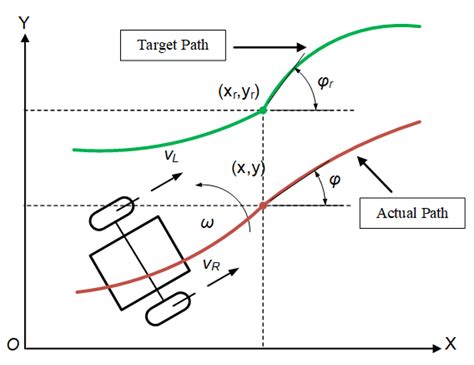
1 · skid steering robot path tracking
2 · skid steered tracking robot
3 · skid steer with side door
4 · jcb skid steer specs
5 · jcb mini skid steer
6 · bobcat jcb
Looking for cheap skip hire in the Hednesford area? Whatever you need, we have a skip for you! Mini, midi, maxi, builders, large & extra large skips. Call today.
slope based robot path tracking
1993 mustang 940 skid steer attachments
skid steering robot path tracking
Abstract. Recently autonomous ground vehicles have been extensively used due . Skid-steering mobile robots are widely used because of their simple mechanism . Abstract. Recently autonomous ground vehicles have been extensively used due to their effective maneuvering capability in unstructured environments specifically for reconnaissance, agricultural.
Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a . Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a . Skid-steered mobile robots are often used in outdoor exploration due to their robust mechanical structure and high maneuverability. When they track reference path on a slope with boundaries, ensuring the tracking accuracy and stability of the skid-steered mobile robot is .
For wheeled mobile robots (WMRs), one of the prominent and widely used driving schemes is skid steering. Because of mechanical simplicity and high maneuverability particularly in outdoor applications, SSWMR has an advantage over its counterparts.Skid-steering mobile robots (SSMRs) are quite different from classical wheeled mo-bile robots for which lack of slippage is usu-ally supposed – see for example [3].
1985 new holland skid steer starter removal
A Friction-Based Kinematic Model for Skid-Steer Wheeled Mobile Robots. Sadegh Rabiee1 and Joydeep Biswas1. Abstract—Skid-steer drive systems are widely used in mobile robot platforms. Such systems are subject to significant slippage and skidding during normal operation due . To solve these problems, we developed a four-wheel, independently driven skid-steer mobile robot with a damping module for the timing-belt servo system and proposed a model-based coordinated trajectory tracking control method with the timing-belt servo system. To demonstrate the LG approach and its versatility and robustness, this paper develops an LG model representation of the dynamics of a four-wheel skid-steer mobile robot and verifies the accuracy by comparing the physical system and existing model provided in a popular robotics simulator (Gazebo). Skid-Steer Wheeled Mobile Robots (SSWMRs) achieve turning motion by rotating one side of the wheels at different revolutions per minute than the other. As a result, they are able to turn in-place which increases their maneuverability. However, this also leads to significant tire skidding and slipping [2].

Abstract. Recently autonomous ground vehicles have been extensively used due to their effective maneuvering capability in unstructured environments specifically for reconnaissance, agricultural. Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a . Skid-steering mobile robots are widely used because of their simple mechanism and robustness. However, due to the complex wheel-ground interactions and the kinematic constraints, it is a challenge to understand the kinematics and dynamics of such a .
Skid-steered mobile robots are often used in outdoor exploration due to their robust mechanical structure and high maneuverability. When they track reference path on a slope with boundaries, ensuring the tracking accuracy and stability of the skid-steered mobile robot is .
For wheeled mobile robots (WMRs), one of the prominent and widely used driving schemes is skid steering. Because of mechanical simplicity and high maneuverability particularly in outdoor applications, SSWMR has an advantage over its counterparts.
Skid-steering mobile robots (SSMRs) are quite different from classical wheeled mo-bile robots for which lack of slippage is usu-ally supposed – see for example [3].
A Friction-Based Kinematic Model for Skid-Steer Wheeled Mobile Robots. Sadegh Rabiee1 and Joydeep Biswas1. Abstract—Skid-steer drive systems are widely used in mobile robot platforms. Such systems are subject to significant slippage and skidding during normal operation due .
To solve these problems, we developed a four-wheel, independently driven skid-steer mobile robot with a damping module for the timing-belt servo system and proposed a model-based coordinated trajectory tracking control method with the timing-belt servo system. To demonstrate the LG approach and its versatility and robustness, this paper develops an LG model representation of the dynamics of a four-wheel skid-steer mobile robot and verifies the accuracy by comparing the physical system and existing model provided in a popular robotics simulator (Gazebo).

By following these guidelines, beginners can navigate their way through the mini digger operation with confidence and minimize the risk of accidents. Do Get the Proper Training . Compared to other heavy-duty construction equipment, mini diggers don’t require a .
skid steer robotics|slope based robot path tracking